Assistant Professor
Phone: 903.566.6125
Email: cgoh@uttyler.edu
Building: RBN 1012
Department: Mechanical Engineering
Popular Searches

Assistant Professor
Phone: 903.566.6125
Email: cgoh@uttyler.edu
Building: RBN 1012
Department: Mechanical Engineering
Dr. Goh’s research integrates artificial intelligence and machine learning into generative design workflows to promote sustainability and innovation in engineering. He develops robotic and automated systems for rehabilitation and healthcare, emphasizing adaptive assistance, sensor integration, and human-centered control. His technical expertise includes finite element analysis, multi-body dynamics, and multi-physics simulation to model biomechanical and electromechanical systems. He also designs smart medical devices with embedded sensors and real-time adaptive control, and applies computational mechanics and optimization techniques to enhance performance and efficiency across complex engineered systems.
Dr. Chung-Hyun Goh is leading the development of an AI-integrated Robotic Walking Training Device (RWTD) designed for gait rehabilitation in elderly and disabled individuals. His research bridges biomechanics, robotics, and machine learning to create adaptive and safe training environments.
Key Features:
Core Objectives:
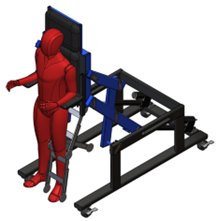 [ 3D CAD Rendering of the Robotic Walking Training Device ]
[ 3D CAD Rendering of the Robotic Walking Training Device ]
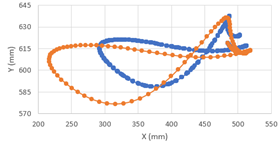
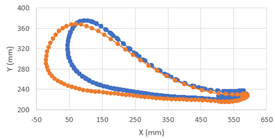
[ Gait Trajectory Prediction using ML: Knee Joint (Top) and Ankle Joint (Bottom)]